Euler angles
PySOFFT uses Euler-angles in the ZYZ-convention as coordinates for rotation group \(\mathrm{SO}(3)\).
Euler angles are disgusting!
To the true connoisseurs among you, especially those coming over from spherical.readthedocs.io.
I know, I share your pain … euler angles are utterly disgusting and indeed quaternions,matrices ,or the axis-angle form are way better. Buuuut Euler angles bribed me … with FFTs … and I could not resist, for now at least.
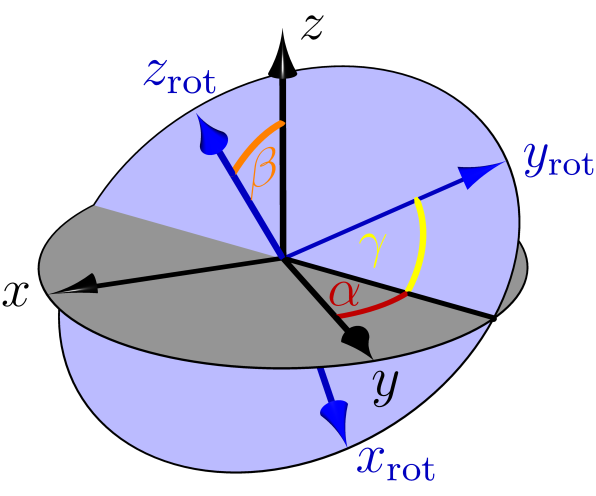 Using the corotation reference picture a rotation \((\alpha,\beta,\gamma)\in\mathrm{SO}(3)\) acts via:
Using the corotation reference picture a rotation \((\alpha,\beta,\gamma)\in\mathrm{SO}(3)\) acts via:
- Rotate by \(\alpha\) around \(\boldsymbol{z}\), which results in a new coordinate frame \((\boldsymbol{x'} ,\boldsymbol{y'} , \boldsymbol{z})\).
- Rotate by \(\beta\) around \(\boldsymbol{y'}\), which results in a new coordinate frame \((\boldsymbol{x''} ,\boldsymbol{y'} , \boldsymbol{z'})\).
- Rotate by \(\gamma\) around \(\boldsymbol{z'}\).
Resulting in the final displayed coordinate axes \((\boldsymbol{x_{\mathrm{rot}}} ,\boldsymbol{y_{\mathrm{rot}}} , \boldsymbol{z_{\mathrm{rot}}})\).
PySOFFT uses the following euler angle sampling for a given bandwith bw.
\[
\begin{aligned}
\alpha_i,\gamma_i &= \frac{i \pi}{\mathrm{bw}} \quad \text{for } i\in\{0,\ldots,2\mathrm{bw}-1\} &
\beta_i &= \frac{(i+\frac{1}{2})\pi}{2\mathrm{bw}} \quad \text{for } i\in\{0,\ldots,2\mathrm{bw}-1\}
\end{aligned}
\]
These angles can be acessed form a transform object via
from pysofft import Soft
s = Soft(8)
a = s.euler_angles['alpha']
g = s.euler_angles['gamma']
b = s.euler_angles['beta']